Human Biomechanics Characterization through Soft Tissue Indentation
This research characterized soft tissue stiffness properties around the human forearm to understand how anatomical location and muscle activation affect human-robot interface behavior. The work established fundamental biomechanical data to inform human-centered design of wearable devices.
For wearable robot design, the question about where to place attachments and how user muscle activation affects interaction is tied to how these variables affect underlying soft tissue properties.
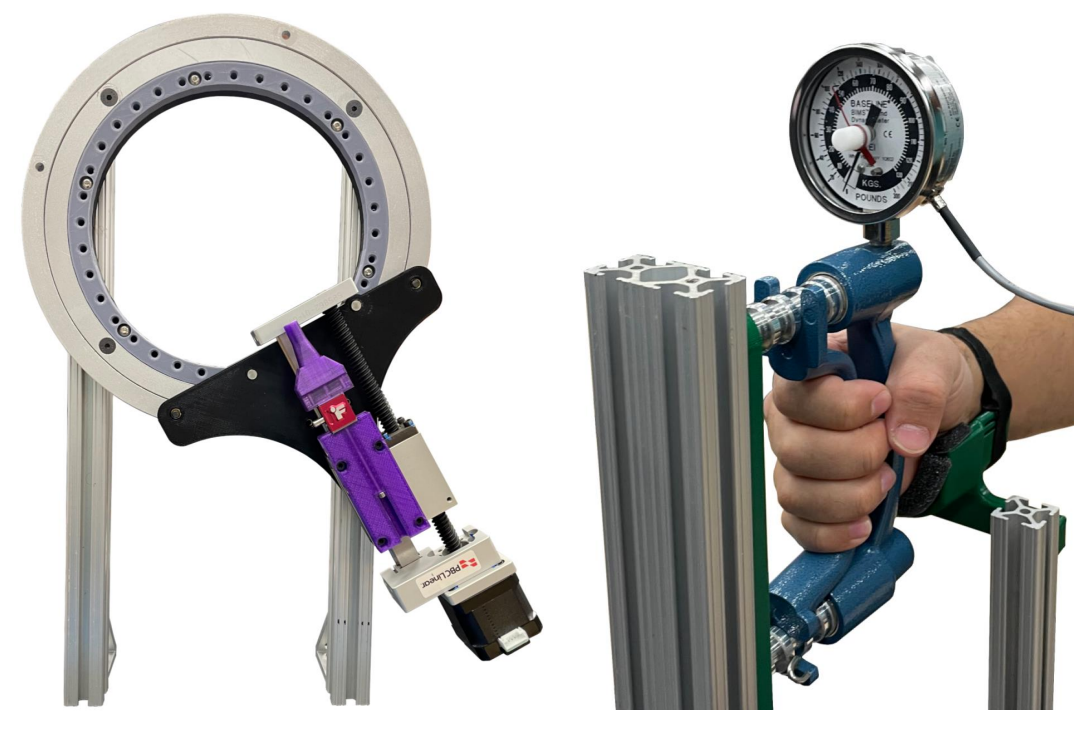
The indenter device uses a single-axis load cell mounted on a linear carriage to measure the forcedisplacement response at the skin surface for various angles around the human forearm. The hand dynamometer measures the grip force exerted by the test subject.
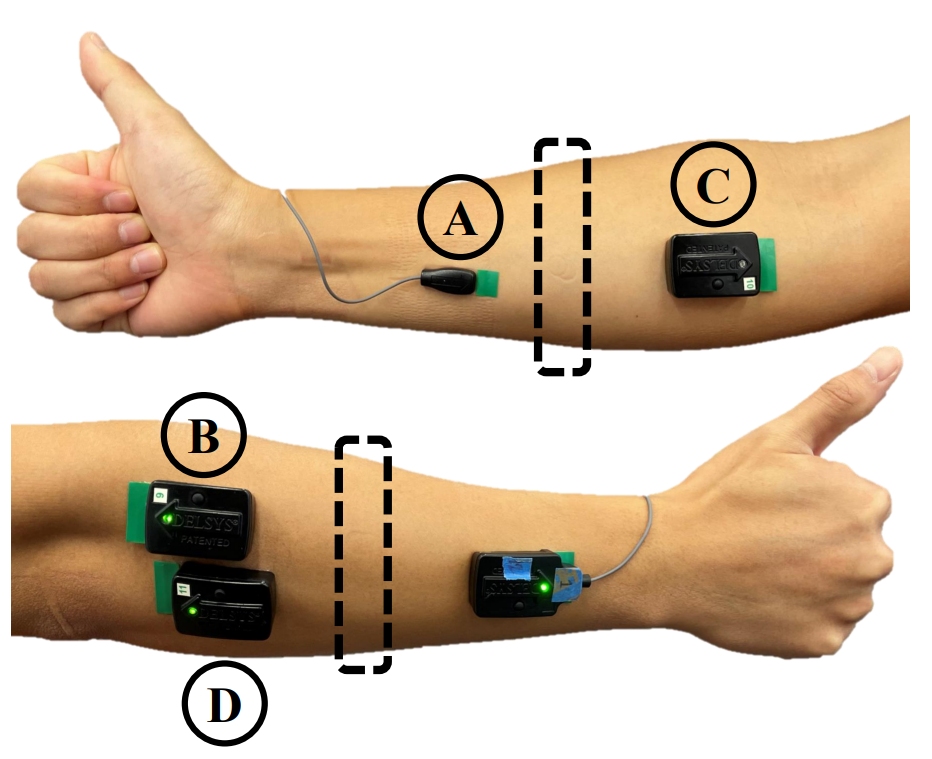
Four sEMG sensors used in the experiment target (A) finger flexion, (B) finger extension, (C) wrist flexion, and (D) wrist extension. The indentation location along the forearm is at the midpoint between the elbow and the wrist.
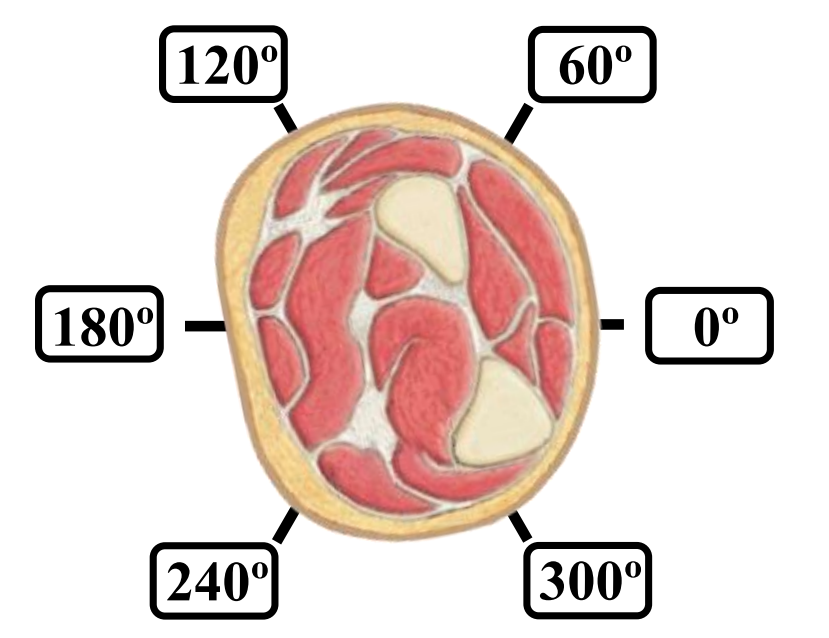
The six angular locations measured in this experiment are shown in the forearm cross section of the right arm, as viewed from the elbow looking out towards the wrist.
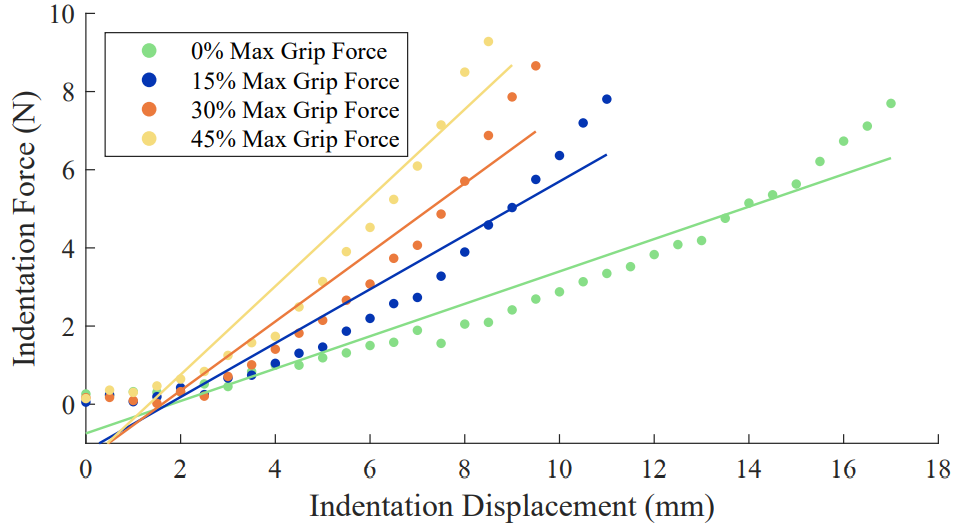
Force-displacement response from the first indentation trial at the 180 degree angular location for one subject at four muscle activation levels along with the fitted linear regression curve. The four muscle activation levels are 0%, 15%, 30%, and 45% of maximum grip force.
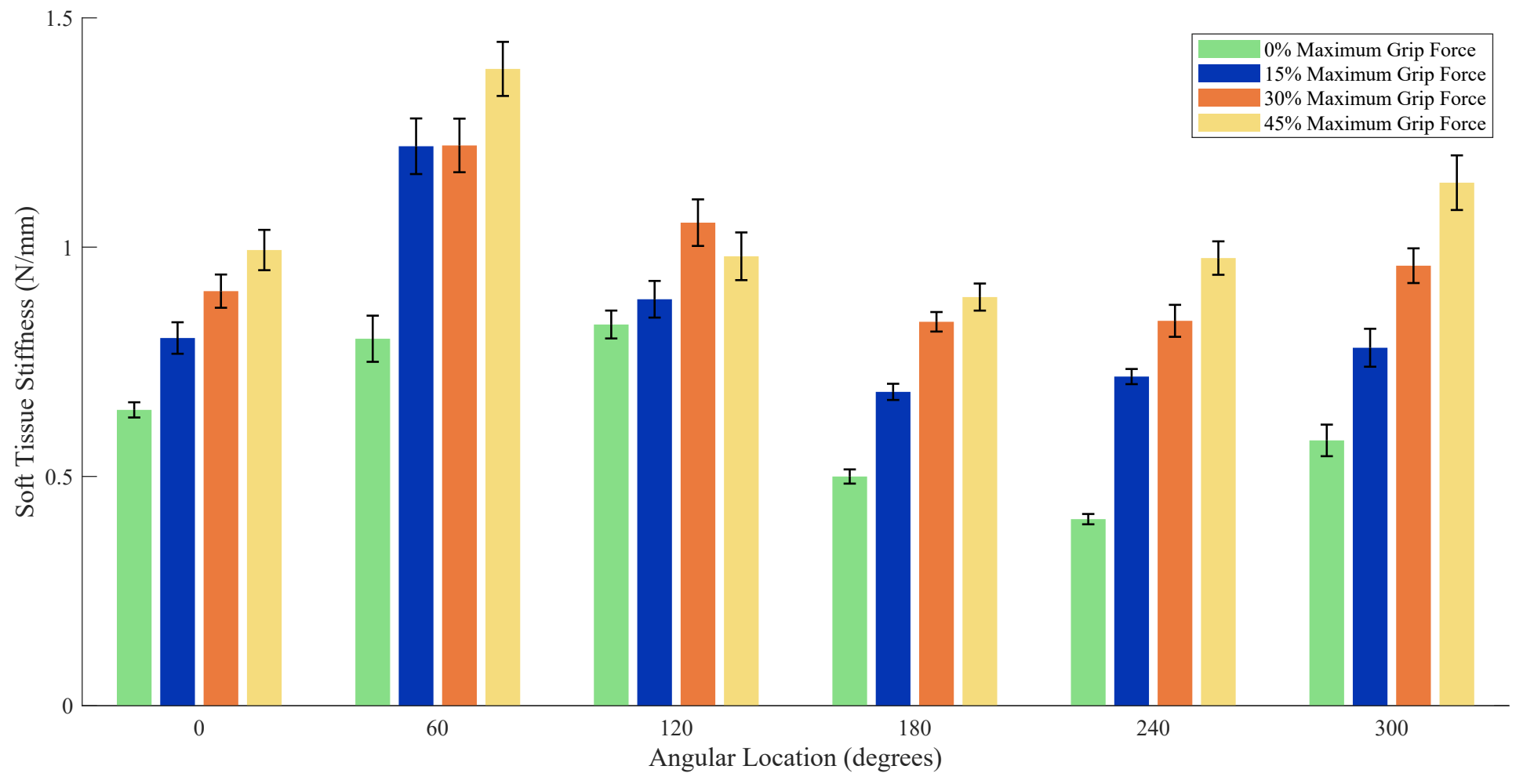
Summary of soft tissue stiffness results from six subjects based on an average stiffness calculation from the loading section of the force-displacement response. The results from four muscle activation levels are given within each of the six angular locations. Each bar is the average of three trials and six subjects, and the error bars represent standard error.
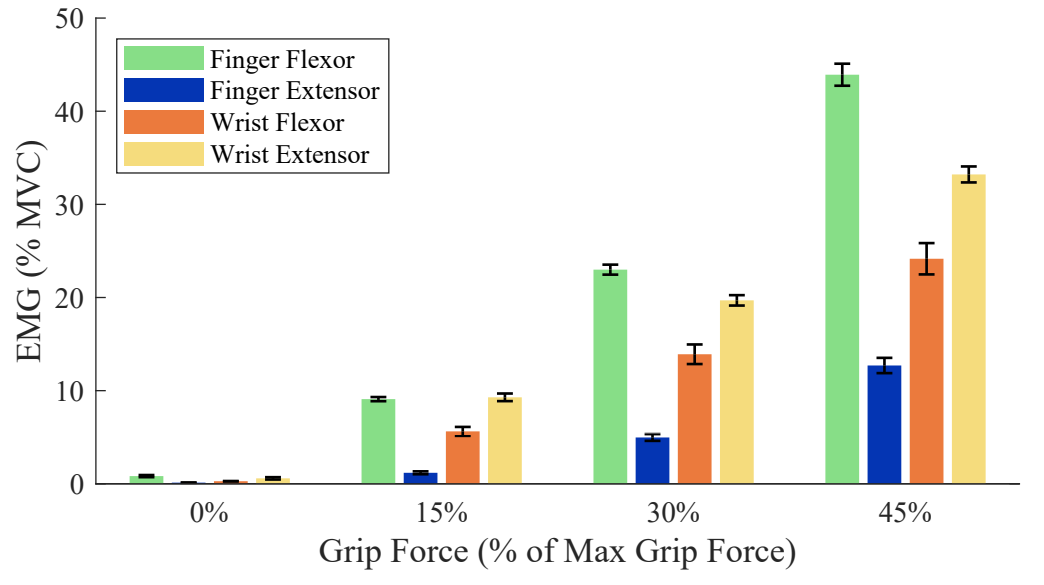
Summary of sEMG measurements based on an average of the four sEMG sensors during the loading section of the force-displacement response. The results from four sEMG sensors are given within each grip force level. Each bar is the average of six angular locations, three trials and six subjects, and the error bars represent standard error.
Contributions:
Conducted comprehensive tissue characterization study across 6 anatomical locations and 4 muscle activation levels with rigorous experimental controls (N=6 subjects)
Implemented automated indentation testing protocols with maximum voluntary contraction (MVC) normalization and randomized testing order to minimize confounding effects
Demonstrated statistically significant effects of angular location and muscle activation on forearm soft tissue stiffness through controlled biomechanical testing
Established quantitative biomechanical foundation for human-informed hypothesis formulation using force-displacement characterization and statistical analysis methods
Collaborators: Keya Ghonasgi, Paria Esmatloo, Ashish D. Deshpande
Related Publications: