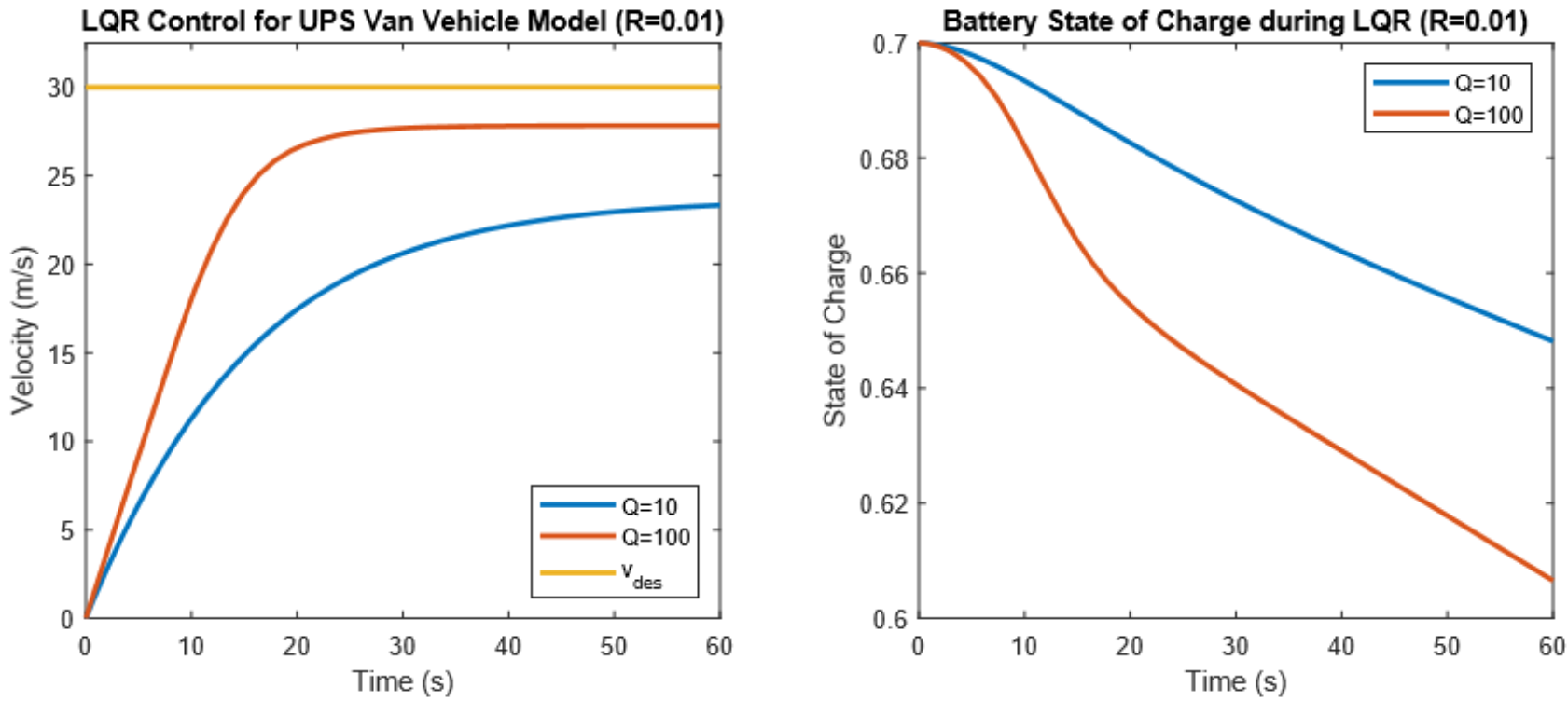
Results from the implementation of a linear-quadratic regulator (LQR).
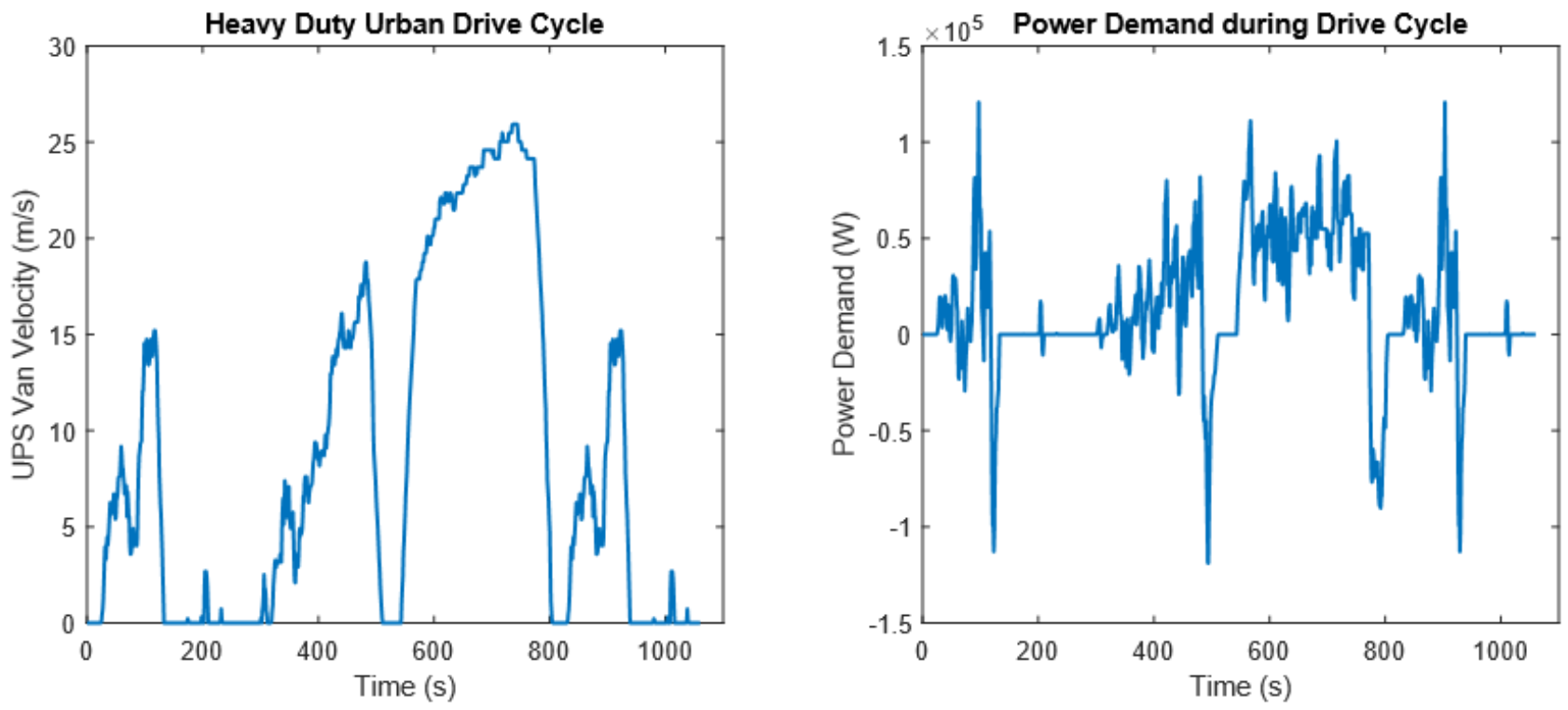
An example drive cycle chosen for the dynamic programming problem.
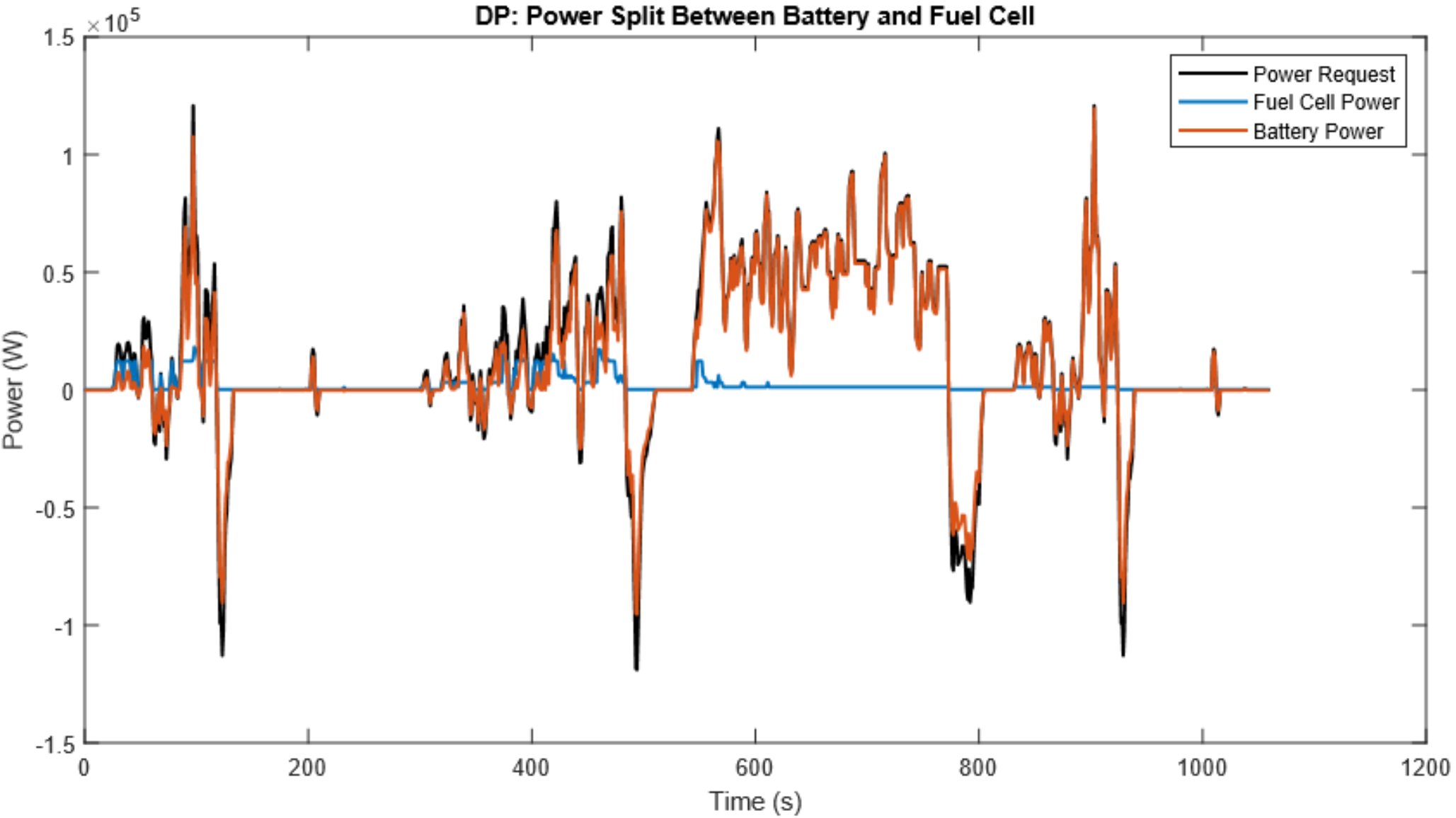
Results from the implementation of dynamic programming. In most instances, it is better to not use the fuel cell power.
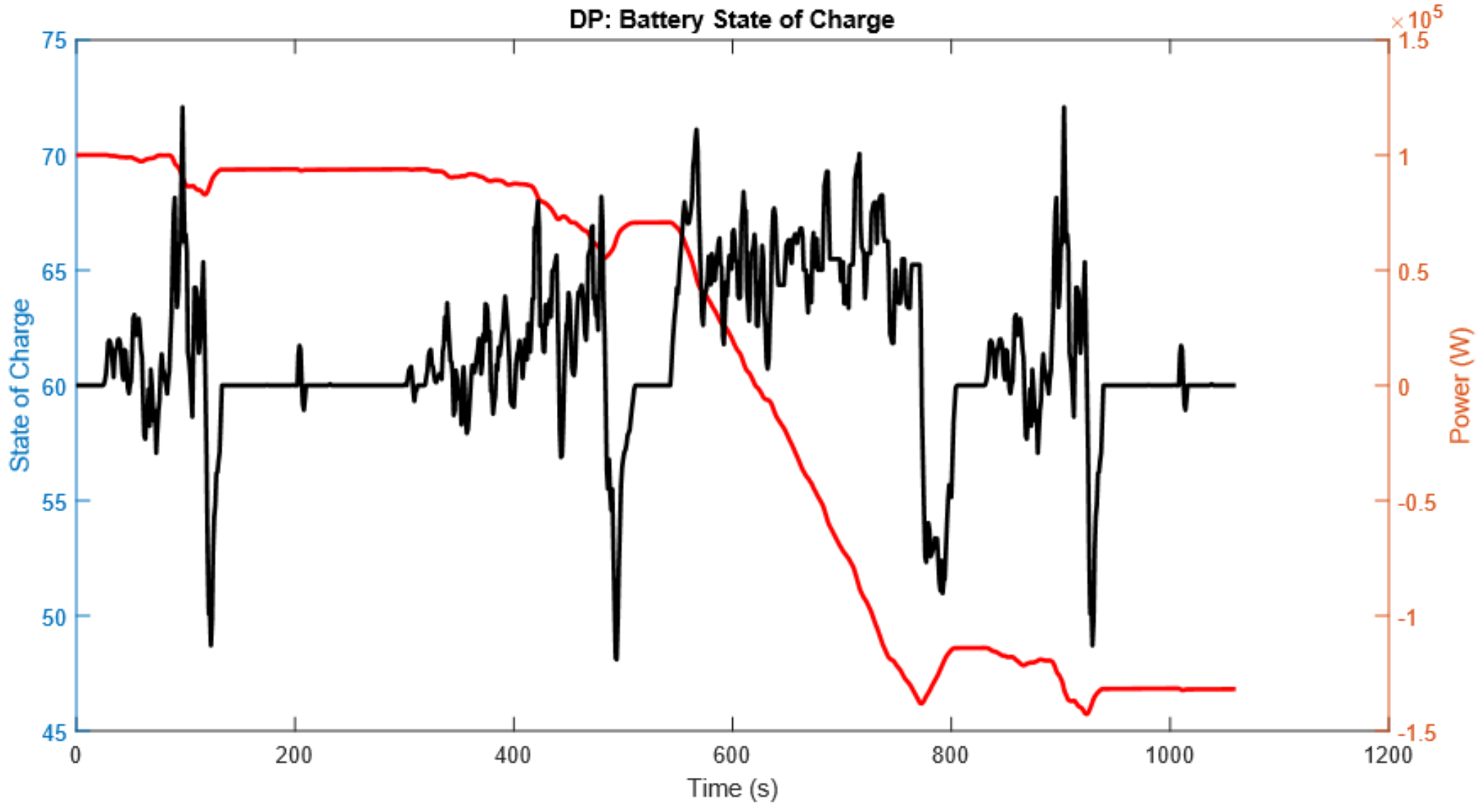
Results show how the fuel cell state-of-charge (SOC) changes during the drive cycle.
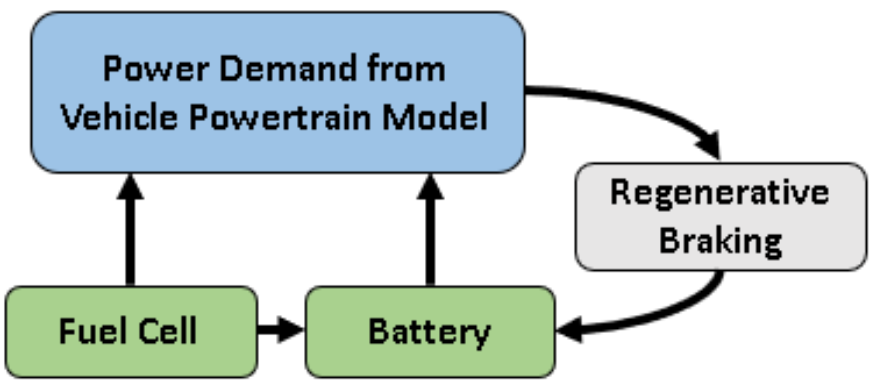
Overview of the vehicle used for the dynamic programming problem.