The goal of my research is to improve physical human-robot interaction (pHRI) by leveraging human characterization and system modeling to balance performance and wearability in upper-body wearable devices.

Three Research Aims: Performance Metrics, Attachment Interfaces, and Device Design

Aim 1: Establish Performance Metrics to Evaluate pHRI
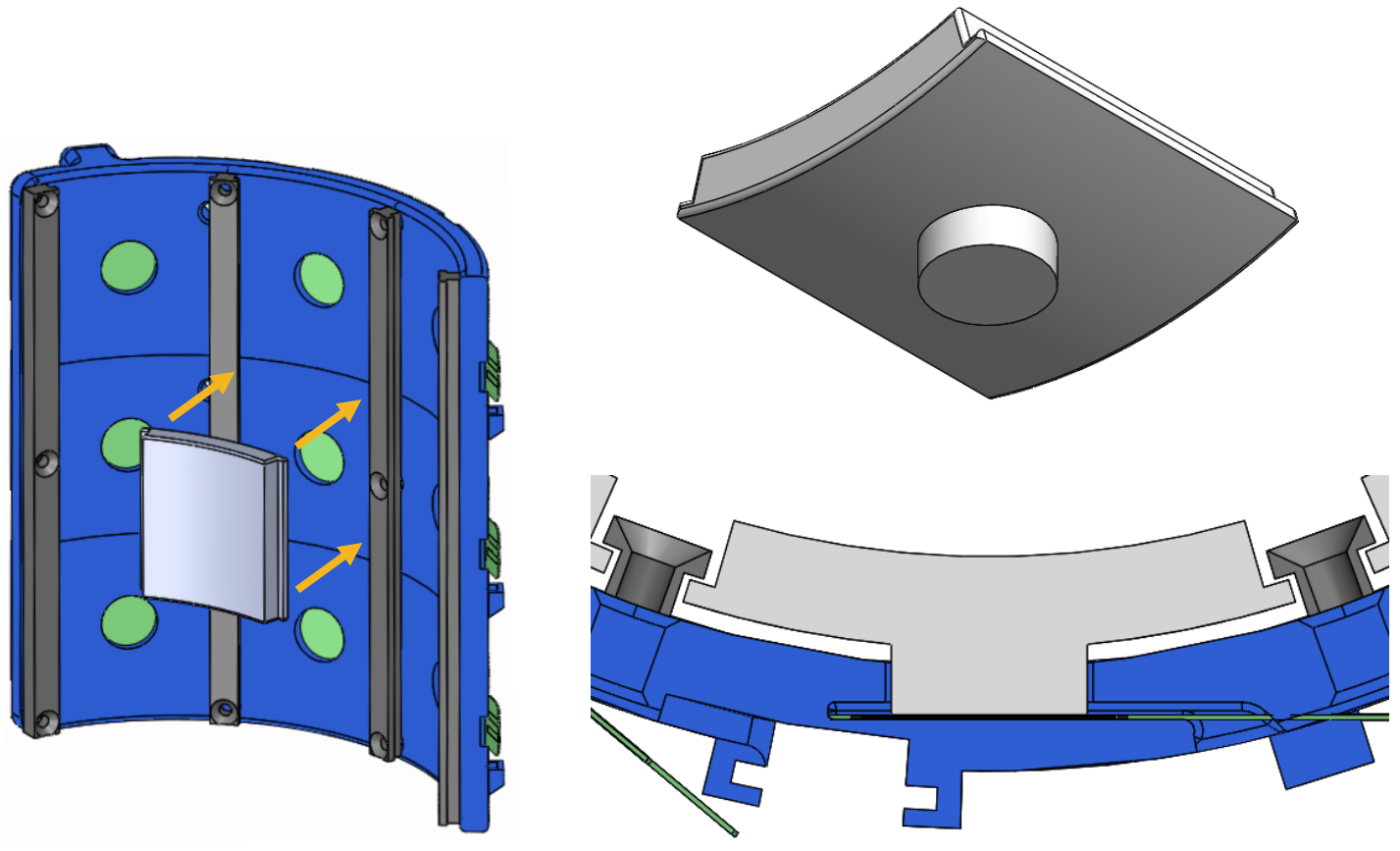
To measure distributed interface loads, I present a sensorized cuff with a modular sensing panel design that uses force-sensing resistors (FSRs). The interface sensing design is validated with controlled loading and preliminary testing with the Harmony exoskeleton’s upper-arm attachment.


To measure interface power and energy loss, I present a novel estimation method using the Maestro hand exoskeleton and experimental joint torque data. The repeatability of interface power estimation is confirmed with human testing, and a case study is performed to the study the effects of interface padding.



Aim 2: Improve Attachment Interfaces with a Human-Centered Approach Using Soft Tissue Properties
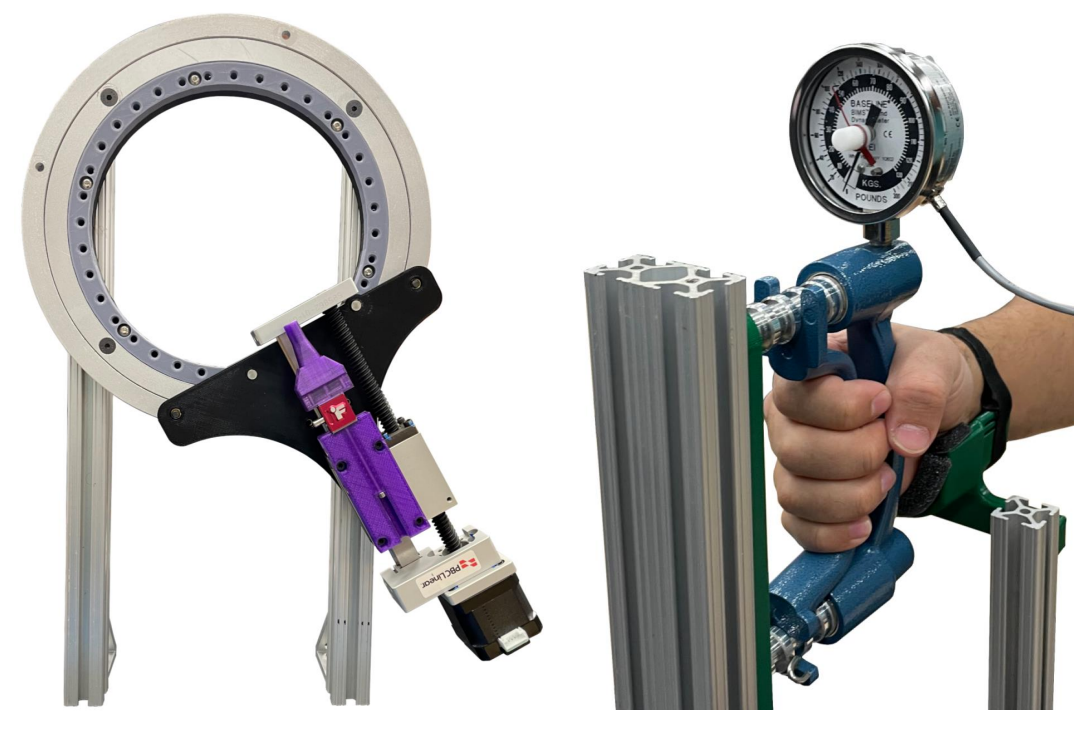
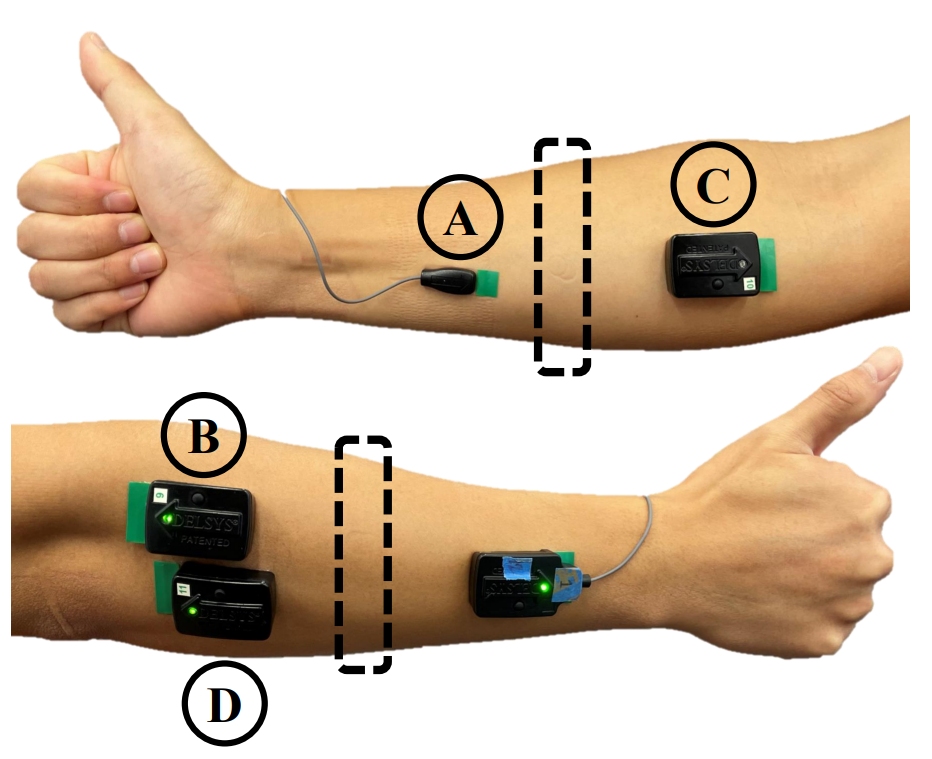
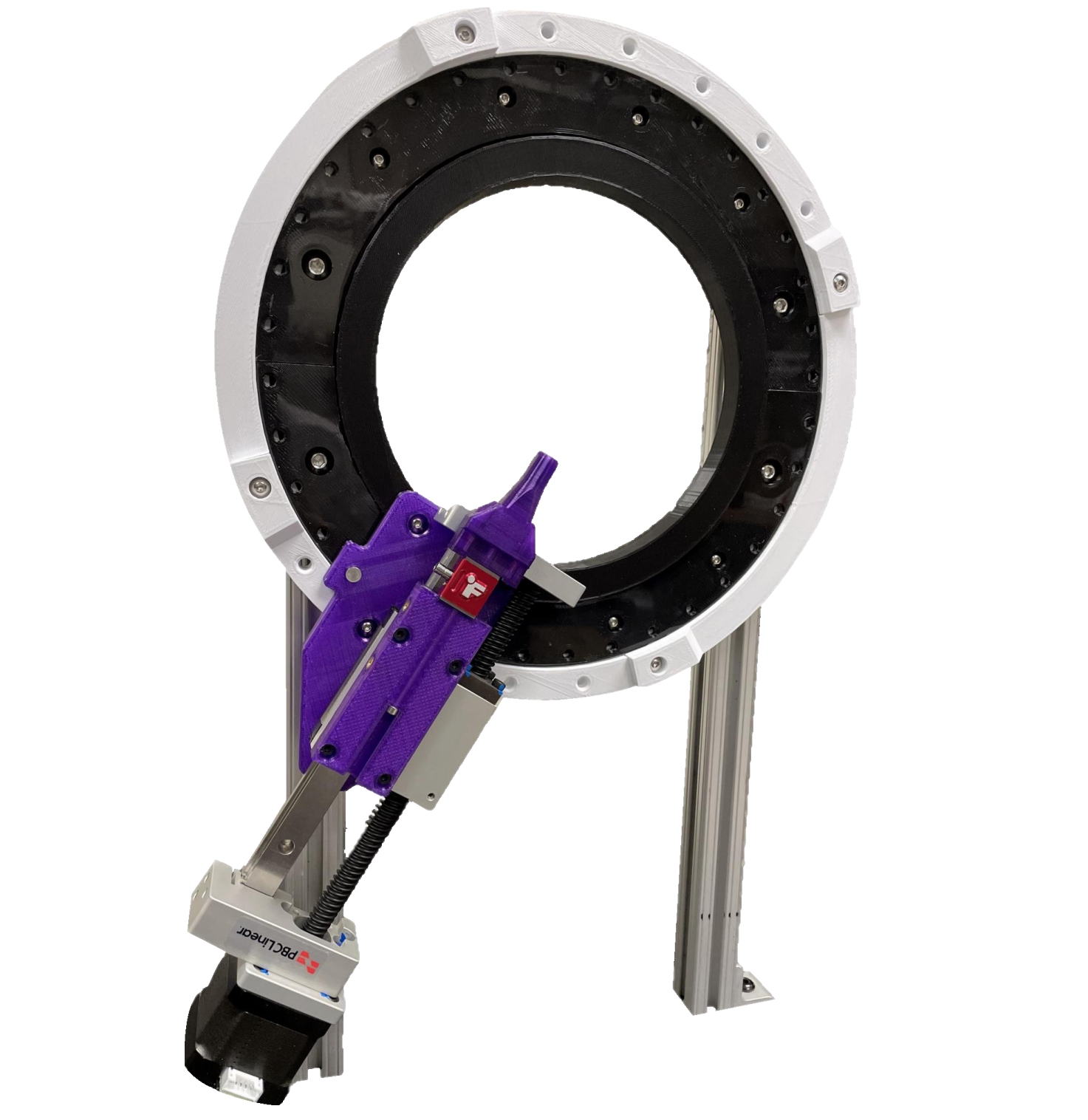
To identify factors that affect interaction at attachment interfaces, I establish the significance of muscle activation and angular location on soft tissue stiffness at the human forearm. Characterization of soft tissue is performed with an actuated indenter, and muscle activation is measured via grip force and surface electromyography.

Using a human-centered design approach for attachment, I validate a variable stiffness forearm cuff with foam properties matched to corresponding soft tissue stiffness, measured with an actuated indenter. The attachment performance is evaluated using multiple pHRI metrics during three loading conditions.


Aim 3: Inform Robot Device Design through Simulation Modeling of Wearable Hand Devices
To analyze pHRI performance in wearable hand devices, I developed a simulation model in Simscape Multibody to explore the effects of device design parameters such as robot linkage flexibility. Simulation trends are validated with experiments using the Maestro hand exoskeleton.


