Estimation of Interface Power During Physical Human-Robot Interaction
I present a novel method to estimate interface power at physical attachment interfaces using experimental data. The estimation method is demonstrated with the Maestro hand exoskeleton, and a case study is performed to understand the effects of interface padding.

Even the best wearable robots face challenges with power losses in the system, especially at the physical attachment interface. While some sources for power loss are inherent to the system, such as human soft tissue or musculoskeletal joint damping, other sources such as soft padding materials and bias forces from strap tensioning can be modulated to optimize interface power transmission. No method currently exists for estimating power losses at physical interfaces, especially for upper-body exoskeletons. This project presents a novel method to estimate interface power from experimental data in a wearable hand device. The method is implemented with the Maestro hand exoskeleton, and the repeatability of the interface power estimation is confirmed with human testing. A case study is also conducted to investigate how interface foam padding affects energy loss, thus highlighting a use of interface power estimation. The presented method for measurement of interface power can be applied to the study of other wearable devices for evaluating the effectiveness of physical human-robot interaction, thus enabling improvements in the design and control of robots for seamless integration with the human body.

Mechanical power from wearable devices is transmitted to the human user through physical human-robot interfaces, where compliance from biological tissue and soft attachment materials can lead to unintended interface power.

The experiment setup in which the hand is grounded against a flat surface to eliminate any robot power being used for human joint motion. The robot MCP joint is actuated through a Bowden cable SEA, and the measured angle and torque are used to calculate interface power.

The Bowden cable series elastic actuators (SEAs) are driven from the motor pulley to the joint pulley. The linear displacement of springs is used to measure robot joint torque.

Backlash calibration data from the index finger MCP joint in Maestro. As the motor is actuated through an increasing sinusoid, the robot joint follows with horizontal offsets due to Bowden cable backlash. The calibration is performed on the robot system alone without a human user.
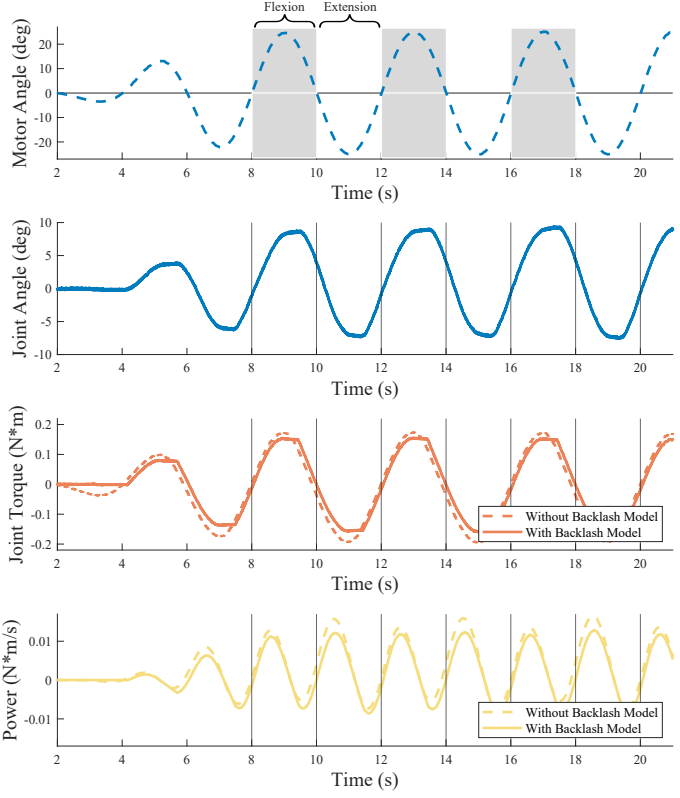
Time series data from one trial with no dorsal interface foam. The motor angle and robot joint angle are measured from Maestro's sensors. The joint torque is calculated using the SEA mechanism, and the resulting interface power versus time is calculated using joint torque and joint velocity from differentiated angle. The two motions are highlighted, with MCP flexion shown in the areas highlighted grey and MCP extension shown in the remaining white areas.

Repeatability results to validate the estimation method for interface power. Each plotted line is the average of three repetitions of MCP extension, and the shaded area shows one standard deviation. The dotted vertical line marks the switch from interface loading to interface unloading, as determined by the motor position input.

Case study results showing interface power versus time for four different foam paddings used at the dorsal interface. Each plotted line is the average of three repetitions of MCP extension, and the shaded area shows one standard deviation. The dotted vertical line marks the switch from interface loading to interface unloading, as determined by the motor position input. (PU=polyurethane, EVA=ethylene-vinyl acetate)
Collaborators: Gaurav Mukherjee, Raymond King, Ashish D. Deshpande
Related Publications:
Estimation of Interface Power During Physical Human-Robot Interaction in Hand Exoskeletons (In Progress)